Hi everybody, lovely to be here. I'm working on a small robotics project and I'm trying to find the position of my robot's pointer. I have mapped the room the robot is in so I know the coordinates and lengths of the walls.
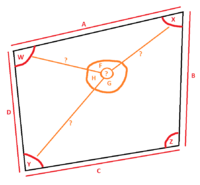
So, I want to be able to aim a light at a corner of the room, then aim it at a different corner (i will record the angle between these), then finally aim at another corner (again I will know this angle). So basically (I think!) I end up with an irregular Tetrahedron with the robot at one point and the corners at the remaining ones. I know the angles adjacent to the robot, and the positions of the other points (and their angles relative to each other) and I need to find the distances of each vertex from the robot to the relevant corner so that I can find its position (or even just its position).
I hope some of this makes sense!! I've spent months trying to find some information on solving this. The closest I came was resection in 3D but the work I found needed distances not angles.
Thank you!
So, I want to be able to aim a light at a corner of the room, then aim it at a different corner (i will record the angle between these), then finally aim at another corner (again I will know this angle). So basically (I think!) I end up with an irregular Tetrahedron with the robot at one point and the corners at the remaining ones. I know the angles adjacent to the robot, and the positions of the other points (and their angles relative to each other) and I need to find the distances of each vertex from the robot to the relevant corner so that I can find its position (or even just its position).
I hope some of this makes sense!! I've spent months trying to find some information on solving this. The closest I came was resection in 3D but the work I found needed distances not angles.
Thank you!